ソリューション
ロボットティーチング
3D CADデータを活用し、ロボット作業を仮想空間で設計、シミュレーション、最適化。これにより、ロボット導入の投資回収期間を短縮し、生産効率を向上させ、製造向け設計(DFM)を実現します。

ロボット導入の投資回収期間を短縮
あらゆるブランドのロボットを、実際の生産前に通常の10倍の速さで簡単にティーチング可能。生産ラインを止めることなく、すぐに稼働開始できます。プログラムを保存しておくことで、今後の他のプロジェクトにいつでも利用できます。

生産効率を向上
ロボットの動作とプロセスを最適化することで、稼働停止時間を最小限に抑えながら、最高水準の品質を安定して実現。効率と精度を最大化し、常に高品質な製品の生産を可能にします。

DFMをサポート
治具やツールの土壇場での変更を排除します。ロボットセルや生産設定の仮想モデルを事前に徹底的にテスト・調整し、本番稼働前に万全の準備を整えます。
ロボットオフラインティーチング(OLP)を使用する理由
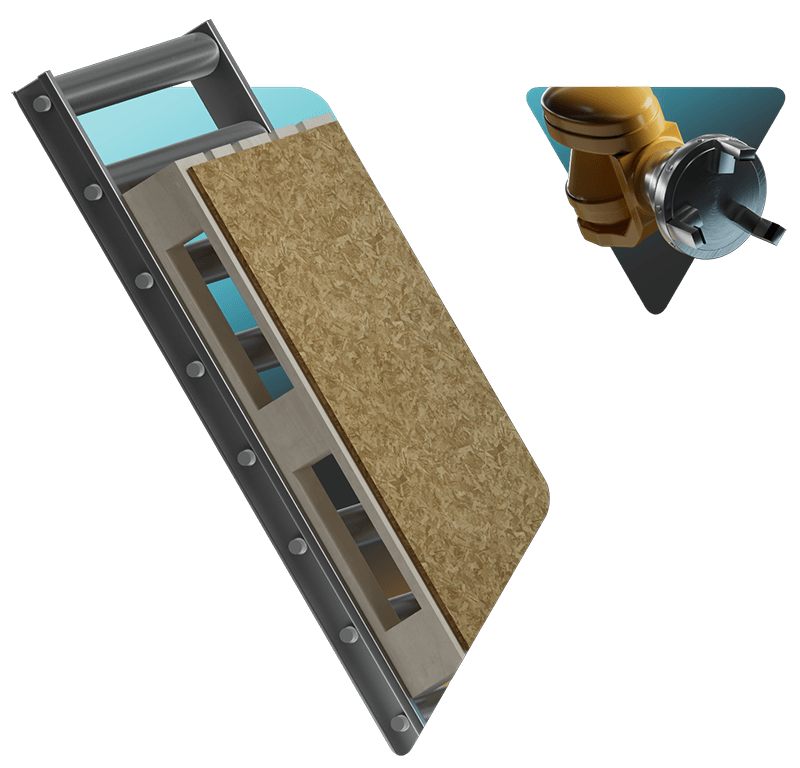
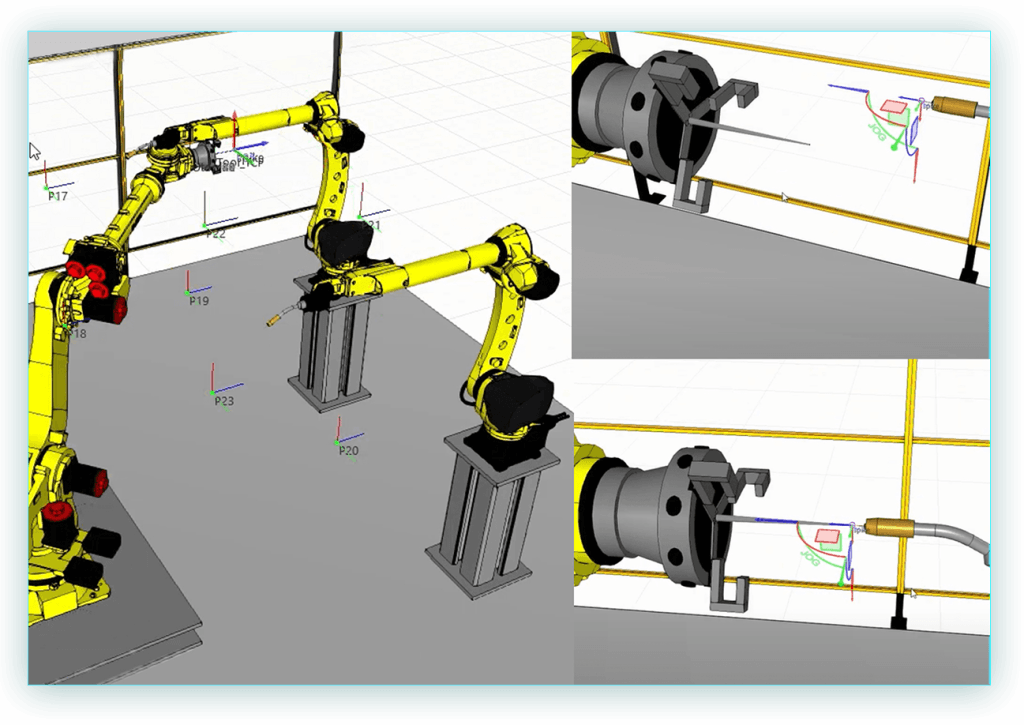
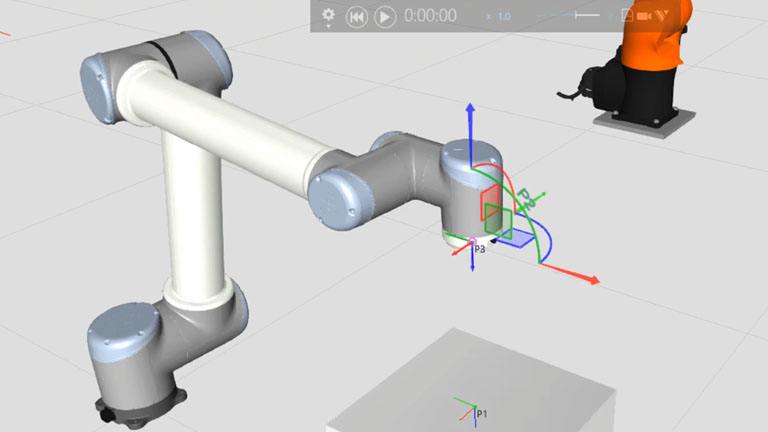
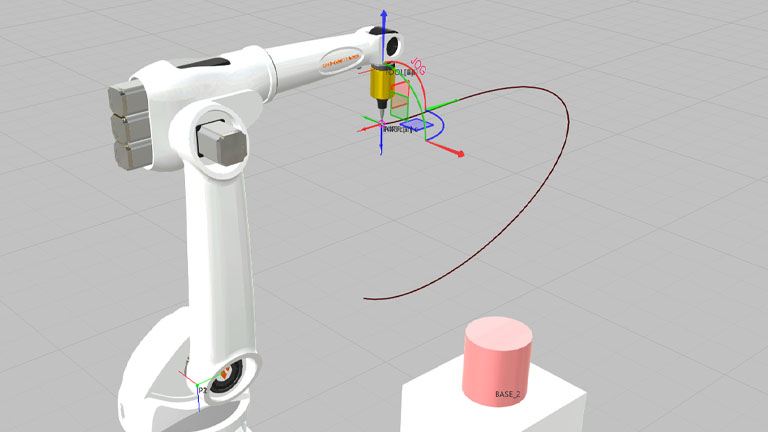
金属部品上の円形のパーツを溶接するためにロボットをティーチングする場面を想像してみてください。ロボットは、溶接トーチをパーツに沿って、3Dの孤を描いて動かし、同時に表面に対して正確な角度を保つ必要があります。
ティーチペンダントを使用してポイントを示すこともできますが、多くのポイントを教示する必要があり、時間がかかります。また、トーチとの隙間や角度がばらつく可能性が高くなります。さらに、ティーチングが完了するまでロボットセルは生産に使用できません。停止時間が数日から数週間続くことがあり、生産に影響が出る可能性があります。
OLPにより、迅速かつ簡単に、そして正確にロボットプログラムを作成できます。
ロボットティーチングとロボットの効率を最大化
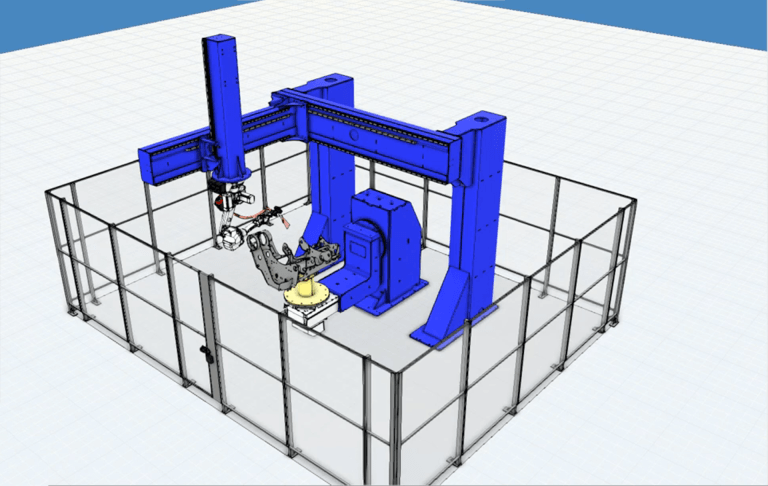
OLPを活用すれば、ロボットの作業を実際のロボットセルとは独立した仮想空間内で設計、シミュレーション、最適化することができます。ソフトウェア上でロボットプログラムを生成し検証した後、そのプログラムを物理ロボットにダウンロードして実行可能です。
これは、複雑なロボット操作を事前に計画し、効率を確保しながらリスクを軽減する上で非常に重要です。OLPソフトウェアを導入したメーカーからは、ロボットティーチング時間が80%短縮され、ロボット稼働率が95%向上したとの報告もあります。
Visual Componentsによるロボットティーチング
ロボットティーチングは、複雑さや反復作業、時間の浪費を伴うものではなく、効率的であるべきです。ロボットティーチングソフトウェアは、生産の柔軟性と適応性を高め、正確さを保ちつつ繰り返し品質を実現できる必要があります。
Visual Componentsは最高レベルの速度と使いやすさのOLPソフトウェアを提供しています。あらゆる産業用ロボットブランド、プロセス、複雑さに対応しており、品質、ロボット稼働率、生産量を最大化する上で役立ちます。
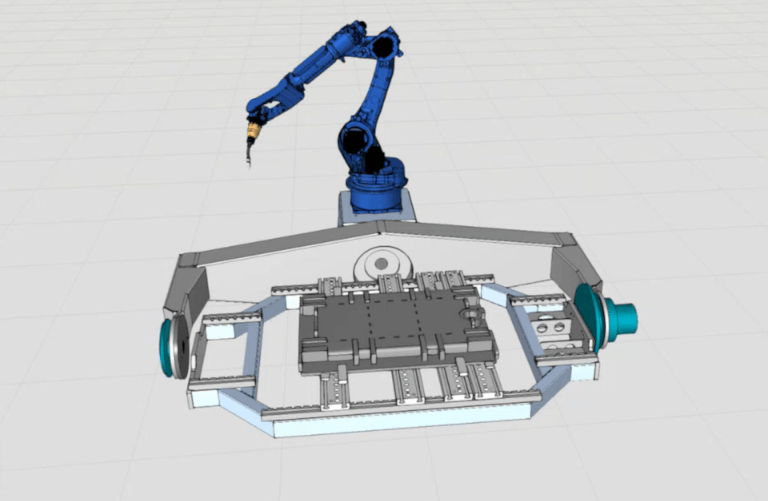
ロボットセルの設計から導入まで
高速・簡単・正確なロボットオフラインティーチングを活用して、ロボットステーションの計画とコミッショニングの効率を向上させることができます。
一般的なOLP作業
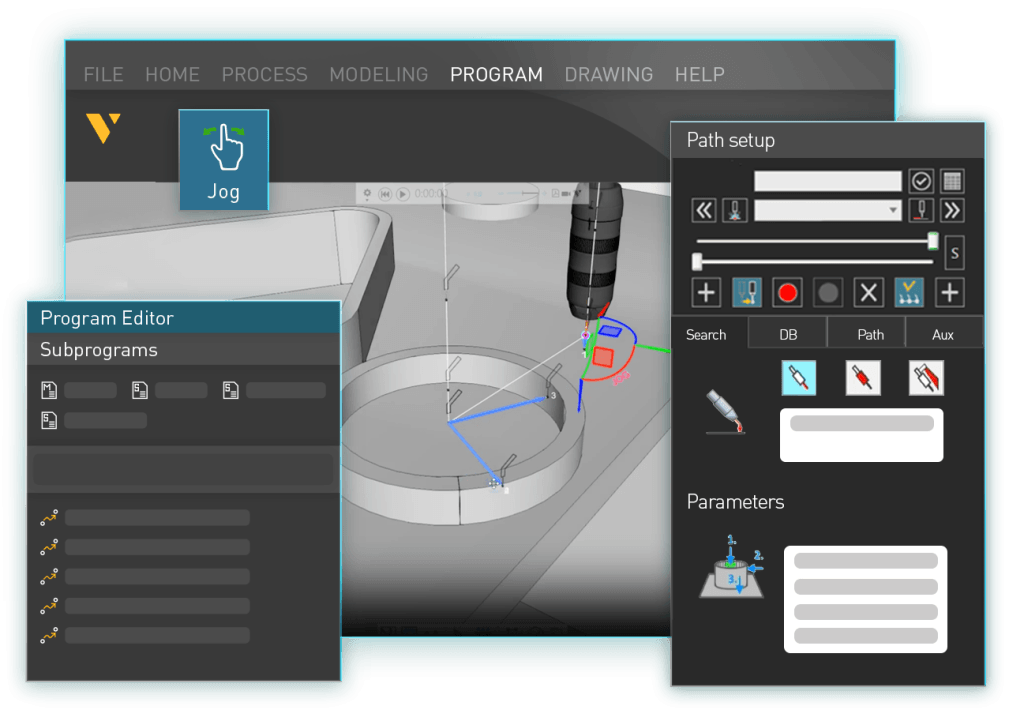
アクセス性や角度の調整はOLPが特に得意とする分野であり、複雑な溶接ビードでは多数のポイントが必要になる場合があります。
ビードブラストやバリ取りなどの作業では、多くの場合、動作パスが長く複雑になるため、多くのポイントが必要になります。
溶接と同様に、塗装では角度の調整が重要です。また、均一な塗膜厚や適切なスタンドオフ距離を維持し、すべてのエリアに最適にアクセスして塗装できることも求められます。
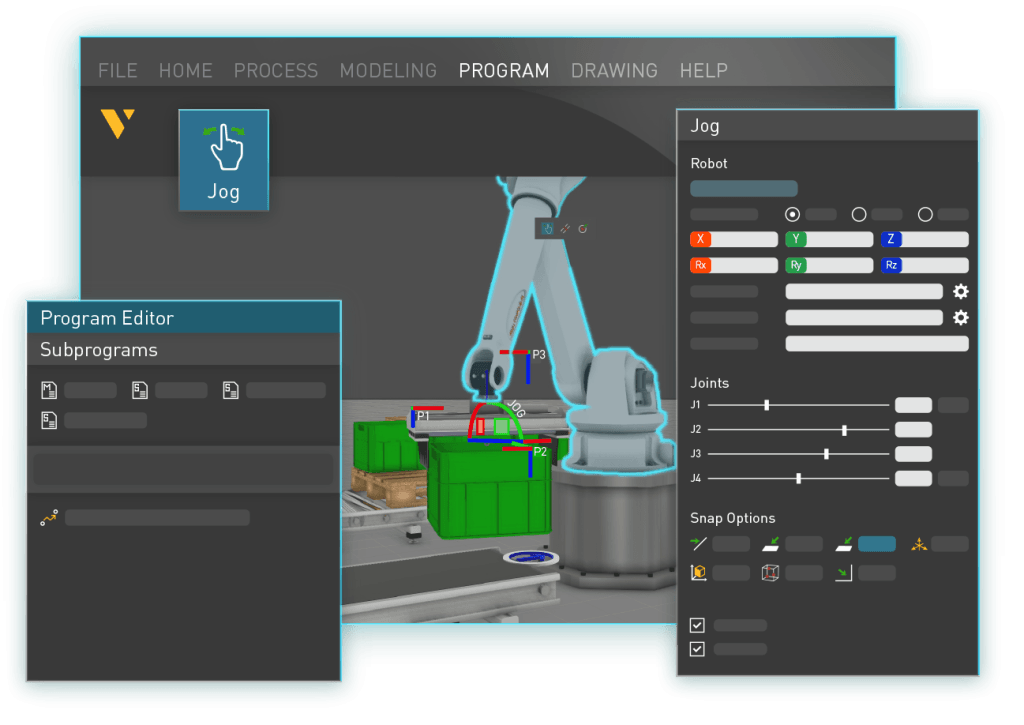
把持や挿入といった動きにおいて、グリッパーの角度を正確に制御する必要があります。OLPにより、その正確性を高めることができます。
標準的な部品の場合、プラズマ切断やレーザー切断、ウォータージェット切断などを使用して切断できますが、複雑な形状の場合は、OLPで生成された正確な切断パターンを実行できるロボットが必要です。
多くの組立工程では、長く複雑な接着剤ビードの塗布が求められます。OLPを活用すれば、均一な品質を維持しながら、ツールパスを迅速にオフラインで作成することが可能です。

ロボットエンジニア向け
手動でのロボットティーチングや手直しにかかる時間を削減し、より重要な業務に注力できます。
製造エンジニア向け
生産開始前に、デザインや治具の実現可能性を簡単に共有・検証できます。

生産管理者向け
生産を止めることなく、ティーチング時間を10分の1に短縮。品質向上、ロボット稼働率の最大化、生産性の向上を実現します。

ロボティクスマネージャー向け
品質、ロボット稼働率、生産性を最大化し、ロボット投資の回収期間を短縮します。
システムインテグレーター向け
デジタルツインを簡単に作成し、納品前に正確性を追求した提案を最適化。高品質を提供し、顧客満足を実現することで競争力を維持します。
FAQ
ロボットオフラインティーチング(OLP)とは、3D CADデータに基づき、コンピューターソフトウェア(仮想空間)内でロボットプログラムを生成する方法です。ソフトウェアでロボットプログラムが生成され、検証されると、それを現場のロボットにダウンロードできます。
OLPの精度は、CADモデルでセルがどれだけ正確に再現されているかに依存しています。CADで再現されている要素だけでなく、実際の作業セルのレイアウトを正確に把握するためには、次のようなロボットセルのキャリブレーションプロセスを実行する必要があります。
- セル内の基準となる一連のポイントを測定します。
- OLPで、ロボットのツールセンターポイント(TCP)や周辺機器の実際の位置を記録します。
- 特定のキャリブレーションプログラムを実行してモデルを実際のセルに合わせ、デジタルツインを完成させます。
測定はロボット自体、または3Dレーザースキャナーなどの外部デバイスを使用して行うことができます。
OLPを活用するには大量生産が必要だとイメージされることがありますが、実際は異なります。OLPは特に生産サイクルが短く、設定や切り替えが頻繁に発生し、タスクの種類が多い場合に効果的です。小規模・中規模の製造業者の方でも、少量生産を行っている場合にはOLPが役立ちます。
他のソフトウェアと同様、OLPでも一定のトレーニングと学習が必要です。どのOLP製品を選ぶかによりますが、優れたOLP製品は直感的かつ論理的で使いやすく、初心者のユーザーでもすぐに使い方を習得できます。また、ティーチペンダントを使用してティーチングする場合、コマンドはブランドごとに異なり、システムが古いロボットモデルから新しいロボットモデルに変更されることもあるため、手動でのティーチングは複雑化する傾向にあります。
OLPソフトウェアは追加購入が必要ですが、購入すれば、あらゆるブランドのロボットをサポートできます(単一のロボットベンダーへの依存を回避できます)。OLPユーザーによると、OLPを導入したことで停止時間が短縮し、ロボット稼働率が向上し、ROI(投資収益率)が改善しました。ティーチングによる停止時間を最大90%短縮し、単一プロジェクトで投資を回収できた事例もあります。
OLPソフトウェアのユーザーによると、以下のようなメリットがあります。
ロボットの停止時間の削減
ティーチング時間を最大80%削減し、ロボット稼働率を最大95%向上させることで、エンジニアの生産性を高め、セルの停止時間を削減できます。
迅速なセットアップ時間
ティーチングが順番ではなく同時に行われるため、新製品を生産に投入するまでの時間が短縮されます。
職場の安全性向上
事故や怪我のリスクを低減できます。
高品質で安定的な生産
ロボットプログラムは、サイクルタイムや品質・安定性の面で最適化されているため、より高品質で安定した生産が可能になります。
ロボットブランドやプロセスに依存しないティーチング
高度なOLPソフトウェアは、ロボットブランドやプロセスの種類に関係なく、すべてのアプリケーションに対応できます。
手直しや遅延の回避
治具やツールの土壇場での変更を回避します。
OLPソフトウェアによりプログラムをより迅速に作成し、ティーチングにかかる時間を短縮できますが、技能を持ったエンジニアは依然として必要です。パス計画や最適化、衝突回避などは経験豊富なエンジニアによって行われるのが最適です。OLPソフトウェアは、エンジニアの生産性を高め、より複雑なティーチングタスクや安全な環境でのイノベーションに時間を費やすために役立ちます。
はい。OLPは精度の高いロボットプログラムを生成することで、現場でのロボットティーチング作業を削減し、調整を最小限に抑えることができます。多くの場合、Visual Components OLPソフトウェアで生成されたプログラムはエラーがなく、シーム検索機能を使用すれば、現場で調整する必要はありません。
OLPはティーチング実行中に発生する一般的なロボットの問題を検出するのに役立ちます。例えば、Visual Components OLPソフトウェアの衝突検出やパスチェックツールを使用すれば、作業環境で到達性、関節制限、特異点、衝突の問題を効率的に特定し、修正できます。
OLPソフトウェアを選ぶ際には、現在および将来のニーズに対応するために、あらゆるロボットブランド、プロセス、複雑さに対応しているかを評価することが重要です。技術的な機能を評価した後、導入やコミッショニングを確実に成功させるために、十分な技術サポートを受けられるかどうかも確認する必要があります。最後に、デモを依頼し、ご自身でソフトウェアを試してみることをおすすめします。
お客様のロボットティーチングにおけるVisual Components活用事例
Bunorm Maschinenbau社:複雑な溶接の品質と効率性の追求
Visual Components OLPが、複雑な部品を製造前にプログラムおよび最適化する上でどのように役立ち、より速いティーチングと品質向上につながったかをご覧ください。
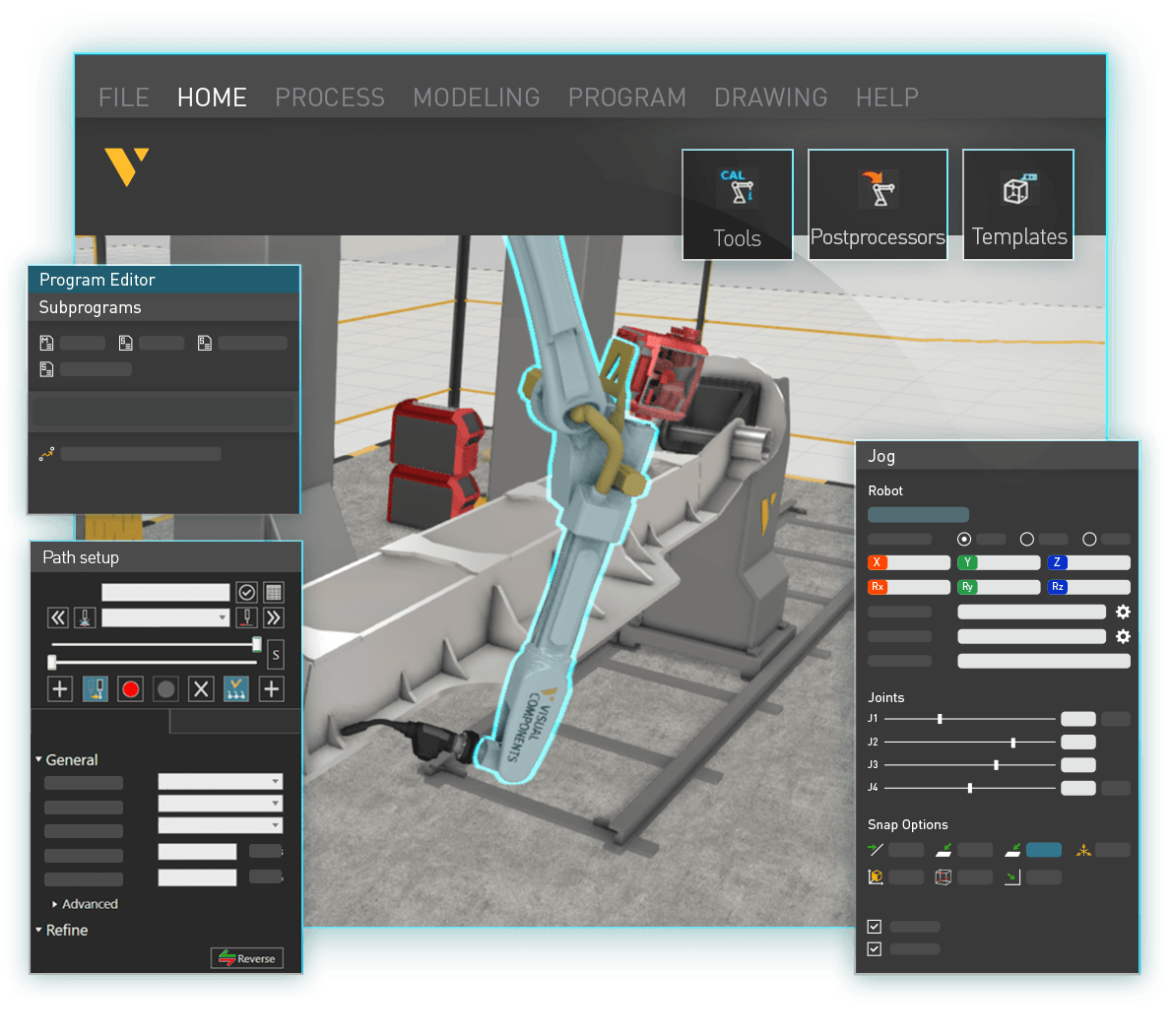
Ponsse社:林業機械のイノベーションを推進し、生産性を向上させる
Visual Components OLPが、オートメーションの利用率を高め、生産性を最大限向上させ、ロボットセルの設計を合理化する上でどのように役立ったかをご覧ください。
Berlin Gardens社:アルミニウム生産におけるロボット溶接の可能性を最大限に引き出す
Visual Components OLPが、どのようにして複雑なタスクに対応するロボットのティーチングを一貫したスピードと品質で実現したかをご紹介します。
Visual Componentsでのロボットティーチングを学ぶ
ロボットOLP入門
溶接、加工、塗装など、Visual Components Robotics OLPにおけるさまざまなロボットプロセスの概要をご覧ください。
ロボットティーチング入門
ロボットの交換、プログラムのテスト、吸着グリッパーの取り付け、部品操作用の信号の設定など、関節ロボットの使用方法をご覧ください。
ロボティクスの基礎
Visual Componentsにおけるロボティクスの概要や、ポイント間移動、直線移動、ロボットベースフレーム、ロボットツールフレーム、ロボットの構成、ロボットの回転などのトピックをご覧ください。