Sehen Sie Sich Unsere Neu Überarbeitete Works Library An!
Wir haben die Visual Components Works Library umfassend überarbeitet und verbessert. Sehen Sie sich die Neuheiten an!

Wir haben die Visual Components Works Library in Works v5.3 umfassend überarbeitet und verbessert, u. a.:
- Bessere Steuerung von Ressourcenstandorten und Visualisierung von Materialfluss
- Bessere Steuerung der Roboterbewegung
- Zusätzliche Eigenschaften in „Advanced“,„Optimization“ und „Monitor“ zur Feineinstellung der Roboterbewegung
- Bessere Steuerung von Ressourcenstandorten
- 5 neue Aufgaben und 3 überarbeitete Aufgaben
Lesen Sie weiter, um mehr über die Neuheiten in Works v5.3 zu erfahren!
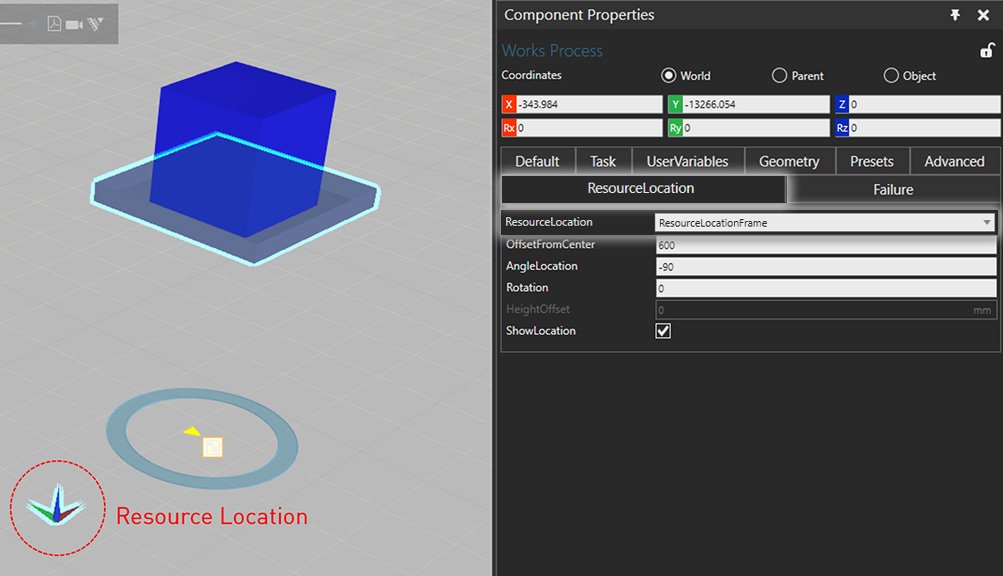
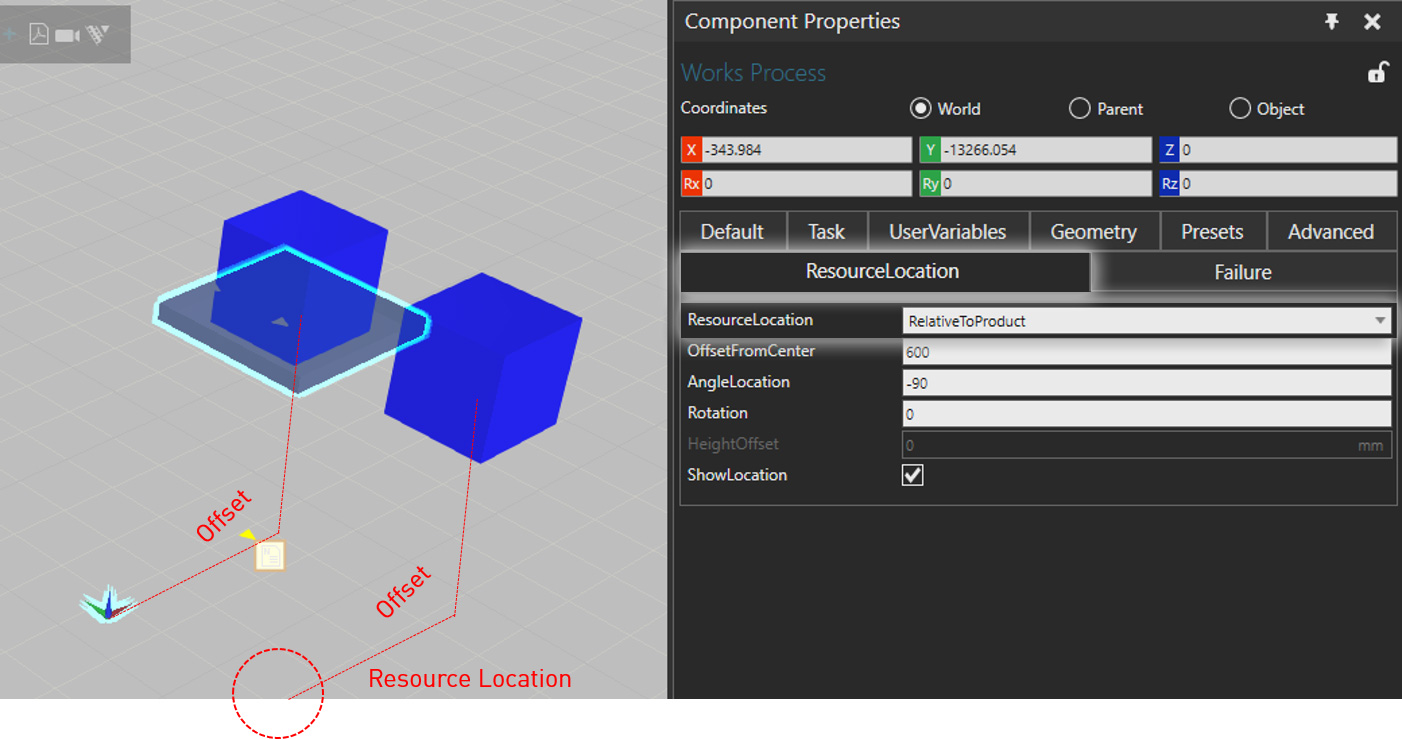
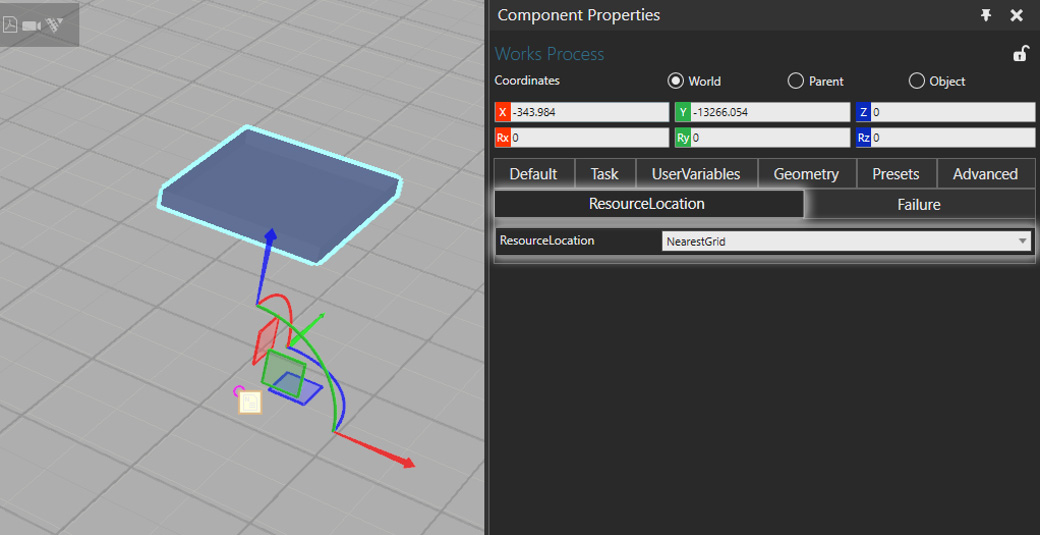
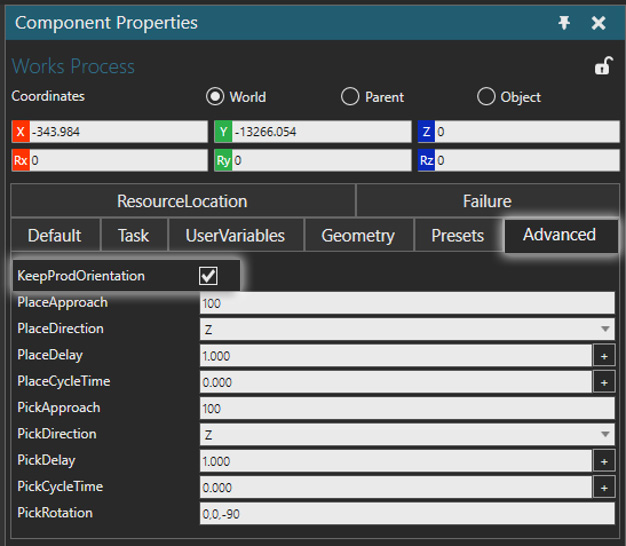
Works-Prozess – Arten von Ressourcenstandort & Produktausrichtung beibehalten
Bessere Steuerung von Ressourcenstandorten und Visualisierung von Materialfluss:
- Ressourcenstandort „ResourceLocationFrame“: Ressourcen werden basierend auf dem Frame „ResourceLocation“ an den Standort verschoben.
- Ressourcenstandort „RelativeToProduct“: Ressourcen werden basierend auf der Produktherkunft an den Standort verschoben, wobei der Versatz vom Frame „ResourceLocation“ und der Herkunft der Works-Prozess-Komponente vorgegeben wird.

- Ressourcenstandort „NearestGrid“: Ressourcen werden in die nächste Anordnung im Verhältnis zum Produkt im Pfadbereich verschoben.

- Produktausrichtung beibehalten „KeepProdOrientation“: Ressourcen behalten die Produktausrichtung bei, wenn sie Produkte aufnehmen und absetzen.

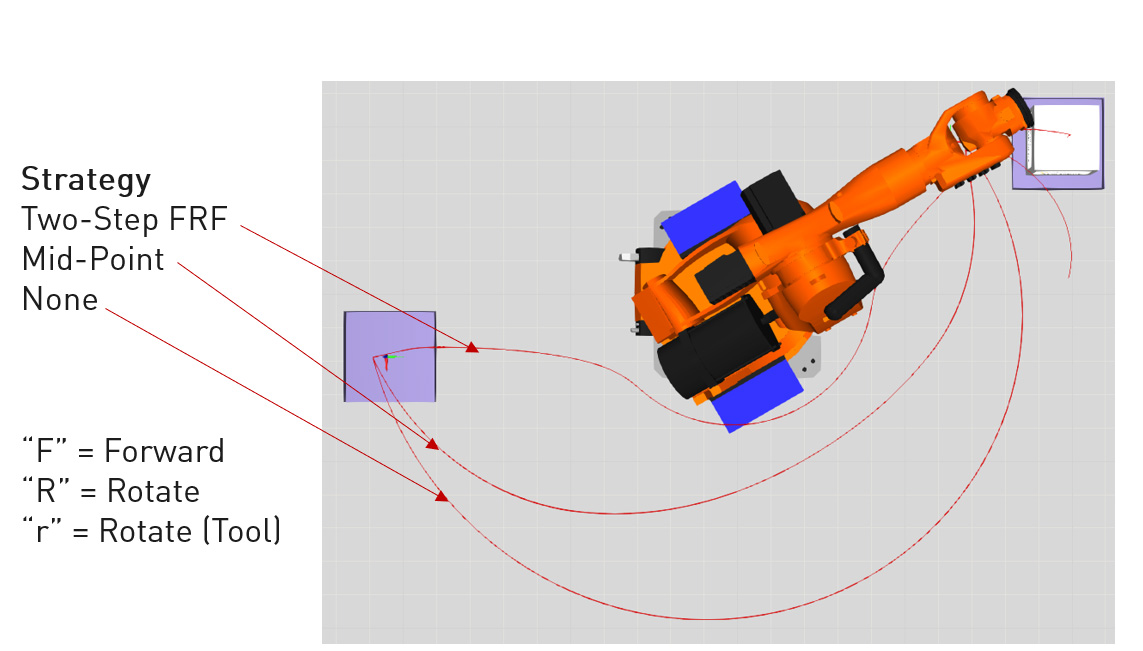
Works-Robotersteuerung – Bewegungspfadsteuerung
Bessere Steuerung der Roboterbewegung – Registerkarte MotionPath kann zur Steuerung der Roboterbewegung beim Aufnehmen und Platzieren genutzt werden.
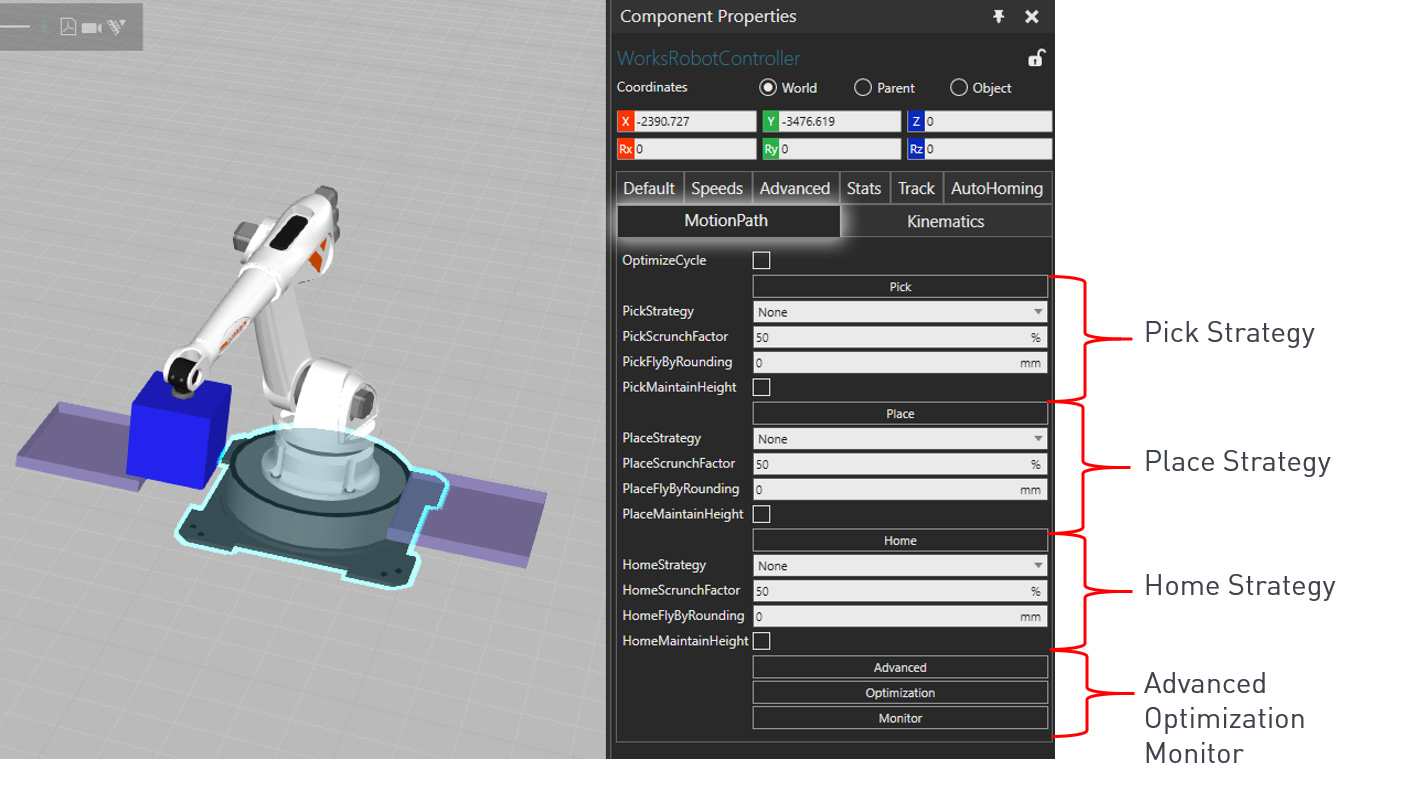
Beschreibungen von Eigenschaften:
- OptimizeCycle: Die Eigenschaft bestimmt, ob der Controller versucht, eine optimierte Strategie zum Aufnehmen und Absetzen mit optimierten Werten zu finden und Kollisionen zu vermeiden.
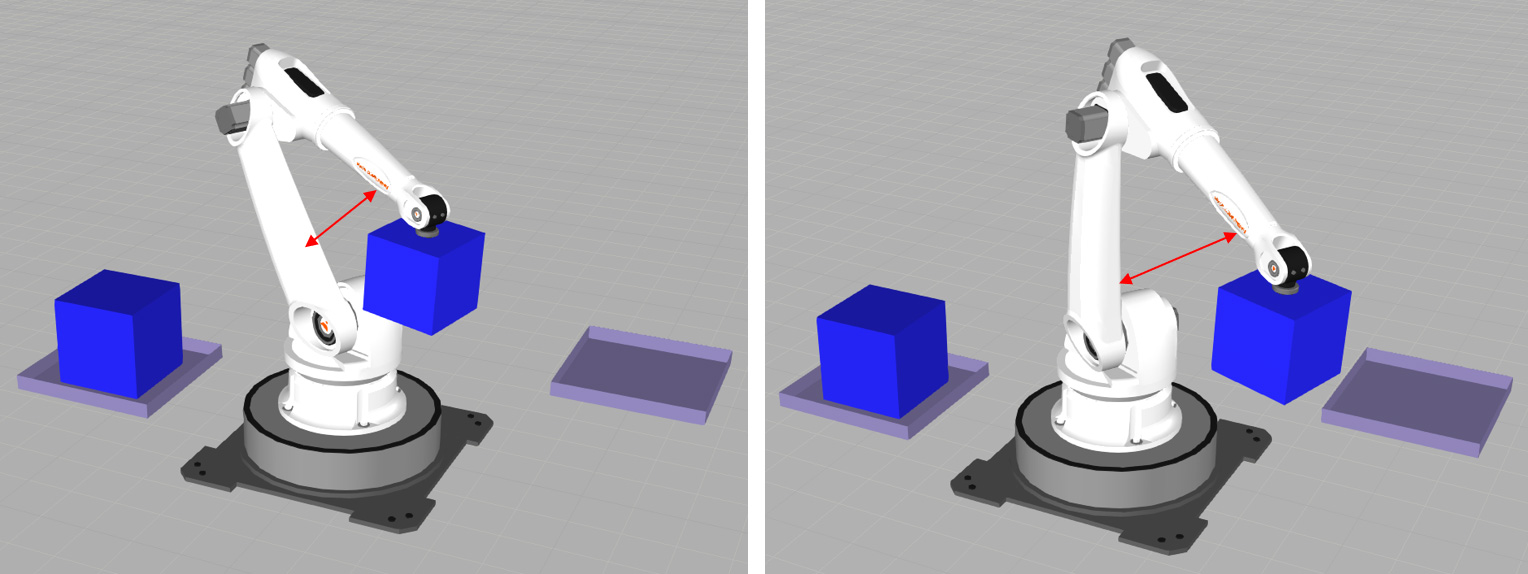
- ScrunchFactor: ScrunchFactor bestimmt den Abstand zwischen einem Roboter und dem Produkt während der Bewegung.
- FlyByRounding: Diese Eigenschaft bestimmt den Umfang des Rundens für die Bewegungen.
- MaintainHeight: Die Eigenschaft bestimmt, ob die Höhe während der Bewegungen beibehalten wird, mit Ausnahme von Heran- und Wegbewegen.
Die zusätzlichen Eigenschaften in „Advanced“, „Optimization“ und „Monitor“ können zur Feineinstellung der Roboterbewegung verwendet werden.
- Erweiterte Eigenschaften:
- MinJ1Delta ist die erforderliche Mindestanzahl an Bewegungen von j1, um eine Strategie nutzen zu können. Bei einer kürzeren Bewegung ist der Bewegungspfad nicht nötig.
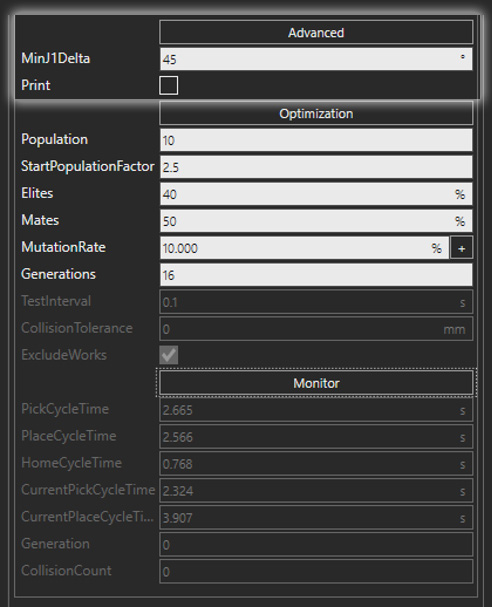
- Optimierungseigenschaften: „Optimization“ sucht die beste Lösung basierend auf einem genetischen Algorithmus. Die „beste“ bzw. „geeignetste“ Lösung hat die wenigsten Kollisionen (idealerweise 0) und die geringste Durchlaufzeit. Die besten Lösungen wechseln zur nächsten Generation, und neue Lösungen werden durch Kreuzen der besten Lösungen und Testen der Ergebnisse generiert.
- Population ist die Anzahl der Lösungen in jeder aufeinanderfolgenden Generation.
- StartPopulationFactor bestimmt die anfängliche Population zufälliger Lösungen, wenn dieser Wert mit Population multipliziert wird.
- Elites bestimmt den Prozentsatz der Lösungen, die automatisch in die nächste Generation wechseln.
- Mates bestimmt den Prozentsatz der verbleibenden Population, die mit der besten Zuchtpopulation gekreuzt wird.
- MutationRate optimiert die Mate-Eigenschaften bei der Erarbeitung einer neuen Lösung.
- Generations bestimmt die Anzahl der Wiederholungen nach Ende der Optimierung.
- TestIntervalbestimmt das Kollisionsprüfintervall.
- CollisionTolerance kann eingestellt werden, wenn nicht exakte Kollisionen gewünscht sind (Beinahezusammenstoß).
- ExcludeWorks schließt Arbeitskomponenten aus der Kollisionsprüfung aus.
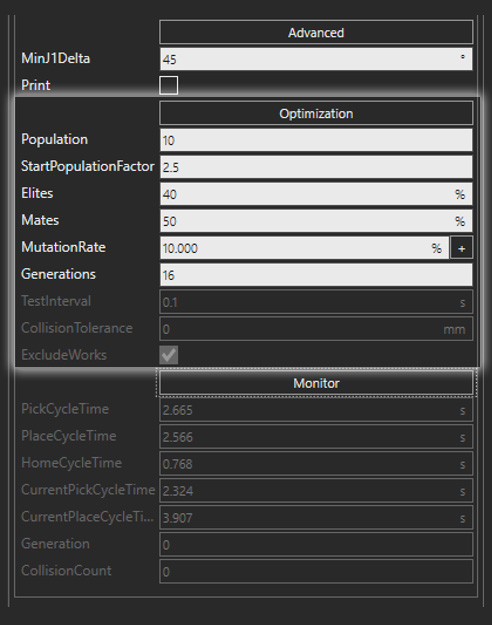
- Überwachungseigenschaften: Diese Eigenschaften werden zur Überwachung des Optimierungsprozesses während der Simulation verwendet.
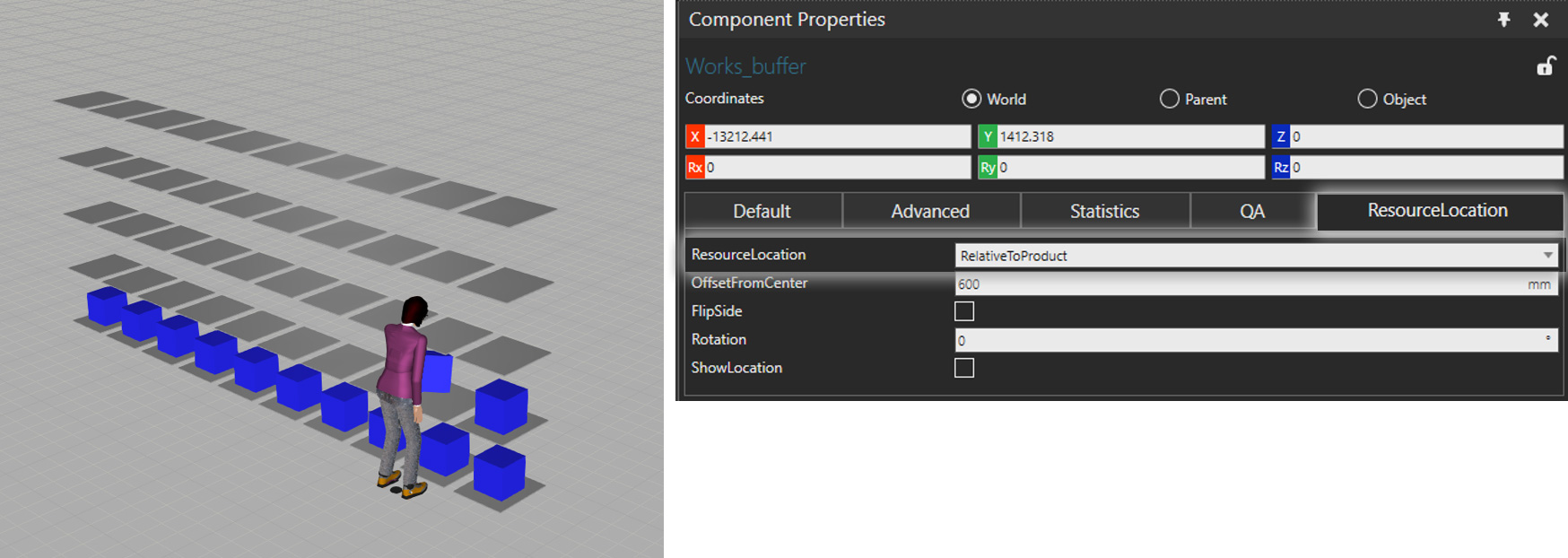
Works Shelf Buffer
Bessere Steuerung von Ressourcenstandorten: Ressourcenstandort wird nun unterstützt. „ResourceLocation“-Typ ist standardmäßig „RelativeToProduct“. Des Weiteren werden Versatz, Seite und Drehung unterstützt.
Neue Aufgabe – „ReserveResource“ & „ReleaseResource“
Ressourcen können für vom Benutzer spezifizierte Aufgaben reserviert werden.
- Bindet eine einzelne Ressource über die Dauer einer vorgegebenen Aufgabe an einen Prozess. Eine zu reservierende Ressource kann automatisch ausgewählt (erste eintreffende Ressource, empfohlen) oder benannt werden.
- Eine Reservierung überschreibt mögliche aktive/vorherige Reservierende. Die Freigabe ist nur durch den aktiven Reservierenden möglich (Arbeitsprozess).
- Eine reservierte Ressource kann nicht von einem anderen Prozess verwendet werden. Die Ressource muss erst freigegeben werden. Reservierte Ressourcen haben in Task Control die höchste Priorität (z. B. vor der nächsten)
- Angewandt auf alle Aufgaben, die eine Interaktion von Ressourcen erfordern: „Feed“, „Need“, „HumanProcess“, „RobotProcess“, „Pick“, „Place“
- In „ReserveFirst“: Wenn eine Ressource eine Transportaufgabe erhält, prüft sie zunächst, ob sie für den Zielprozess reserviert werden muss. Ohne „ReserveFirst“: Sobald die nächste Aufgabe, z. B. „Need“ abgeschlossen ist, reserviert der Prozess die benannte Ressource, bis „ReleaseResource“ aufgerufen wird (mit demselben ResourceName)
Neue Aufgabe – „TransportInPattern“
Unterstützung von Mustern:
- Muster können ab sofort aus dem Linieneingang erstellt werden.
Neue Aufgaben – „WaitProductPick“ & „WaitProductPlace“
Passives Aufnehmen & Absetzen = Ressource wird nicht von der Works Library zugewiesen.
- „WaitProductPick“ wartet, bis das Produkt vom Arbeitsprozess aufgenommen wird.
- „WaitProductPlace“ wartet, bis das Produkt in den Arbeitsprozess platziert wird.
Diese Aufgaben bestimmen nicht, wie oder von wem Produkte aufgenommen/abgesetzt werden. Ein Roboterprogramm könnte beispielsweise eingesetzt werden, um die Produkte mit Fassen und Freigeben aufzunehmen und abzusetzen.
Überarbeitete Aufgabe – „Feed“
Eigenschaftsanzeige mit „#“ in ToolName:
- Unterstützung von Eigenschaftsanzeige mit „#“ in ToolName. Diese Eigenschaft wird nur vom aktiven Produkt (das eingespeist wird) gelesen.
- Wenn „#“ verwendet wird, werden alle weltweit genutzten TCP zur Auswahl aufgeführt.
Überarbeitete Aufgabe – „Loop“
UserVariables in Count & Break betrifft unmittelbar:
- Unterstützung von UserVariables in Count.
- Unterstützung des unmittelbaren Herausbrechens aus dem Loop, wenn sich die Break-Eigenschaft ändert.
Überarbeitete Aufgabe – „Delay“
Unterstützung von Vertriebs-UserVariables:
- Vertriebs-UserVariables werden ab sofort unterstützt.
Zum Weiterlesen
Effiziente Lagerplanung: Wie Simulationen helfen, Lagerprozesse zu optimieren
Wie können Unternehmen Lagerhäuser so gestalten, dass sie vom ersten Tag an effizient arbeiten und gleichzeitig die Arbeitskosten und andere Ausgaben im Zaum halten? Der Schlüssel liegt in einer intelligenten...
Umfassender Leitfaden zu Eingabedaten für die 3D-Fertigungssimulation
Wenn Sie neu in der 3D-Fertigungssimulation sind, sind Sie hier genau richtig. Dieser umfassende Leitfaden hilft Ihnen, die wesentlichen Eingabedaten zu verstehen, die für die Erstellung effektiver Simulationsmodelle erforderlich sind....
Visual Components 4.9: Gestalten mit Klarheit
Visual Components 4.9 bringt mehr Klarheit in die Produktionsplanung und -optimierung in der Fertigung. Mit mehr Klarheit können unsere Anwender mehr erreichen, einfacher und mit größerem Verständnis, besonders wenn sie...