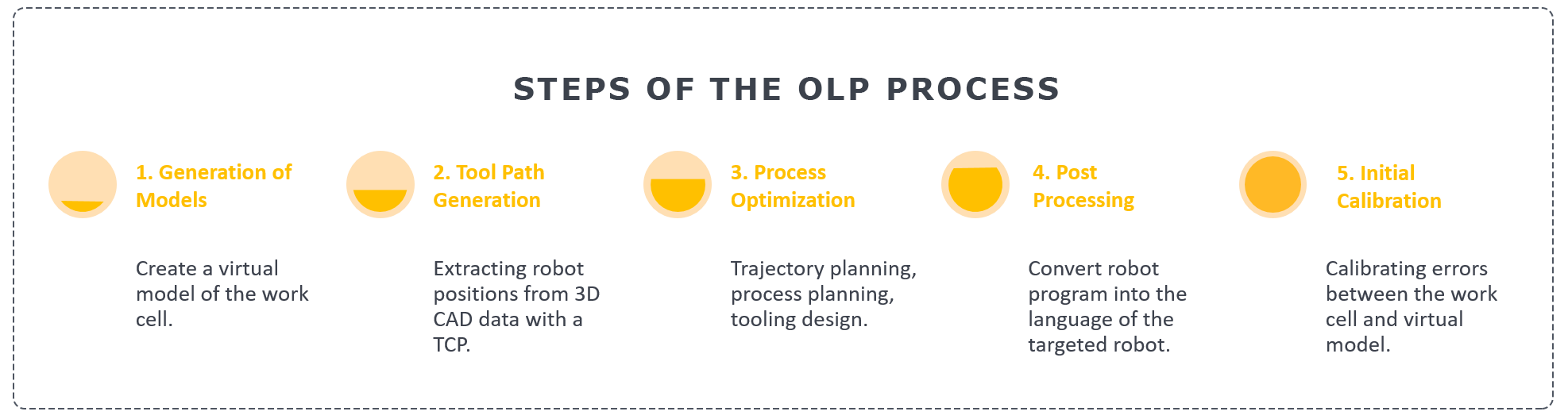
Schritte des OLP-Prozesses
Die Planung und Auslegung einer neuen Roboterarbeitszelle kann sogar für sehr erfahrene Ingenieure eine Herausforderung darstellen. Es gibt viele sich bewegende Teile, Kompromisse, die abgewogen werden müssen, und normalerweise enge Abgabefristen.
Offline Programming (OLP)-Software wird ein immer wichtigeres Tool für Hersteller, die neue Rotoberarbeitszellen planen müssen, und wird für vieles mehr als nur für die Entwicklung von Roboterprogrammen genutzt. OLP-Software unterstützt bei der Planung und Optimierung der Arbeitszellenauslegung, indem es dem Roboter virtuell Aufträge erteilt und die Zeit bis zur Produktion verkürzt. Die Software nutzt 3D-CAD-Daten, um ein virtuelles Modell des Roboters und der Arbeitszelle zu erstellen und simuliert die Prozesse und Arbeitsabläufe innerhalb und außerhalb der Zelle – ein effizientes Tool für Ingenieure und Planer, um ihre Kompromisse zu bewerten und bessere Entscheidungen treffen zu können. OLP-Software bietet eine hohe Rendite für viele Arten von Automatisierungsprojekten, indem sie Zeit spart, die Produktivität verbessert und Herstellern hilft, Chancen für Kosteneinsparungen zu erkennen.
Es gibt viele Methoden und Strategien für OLP und wir sprechen keine Empfehlungen für eine bestimmte Methode aus. In diesem Artikel geben wir Ihnen einen kurzen und allgemeinen Überblick über die Schritte des OLP-Prozesses, insbesondere im Hinblick auf die Planung und Auslegung neuer Roboterarbeitszellen. Der von uns beschriebene Prozess basiert auf einem in 2012 veröffentlichten Artikel mit dem Titel „Recent progress on programming methods for industrial robots“ („Kürzlich erzielte Fortschritte bei Programmiermethoden für Industrieroboter“) von Z Pan et al (1).
1. Modellerstellung
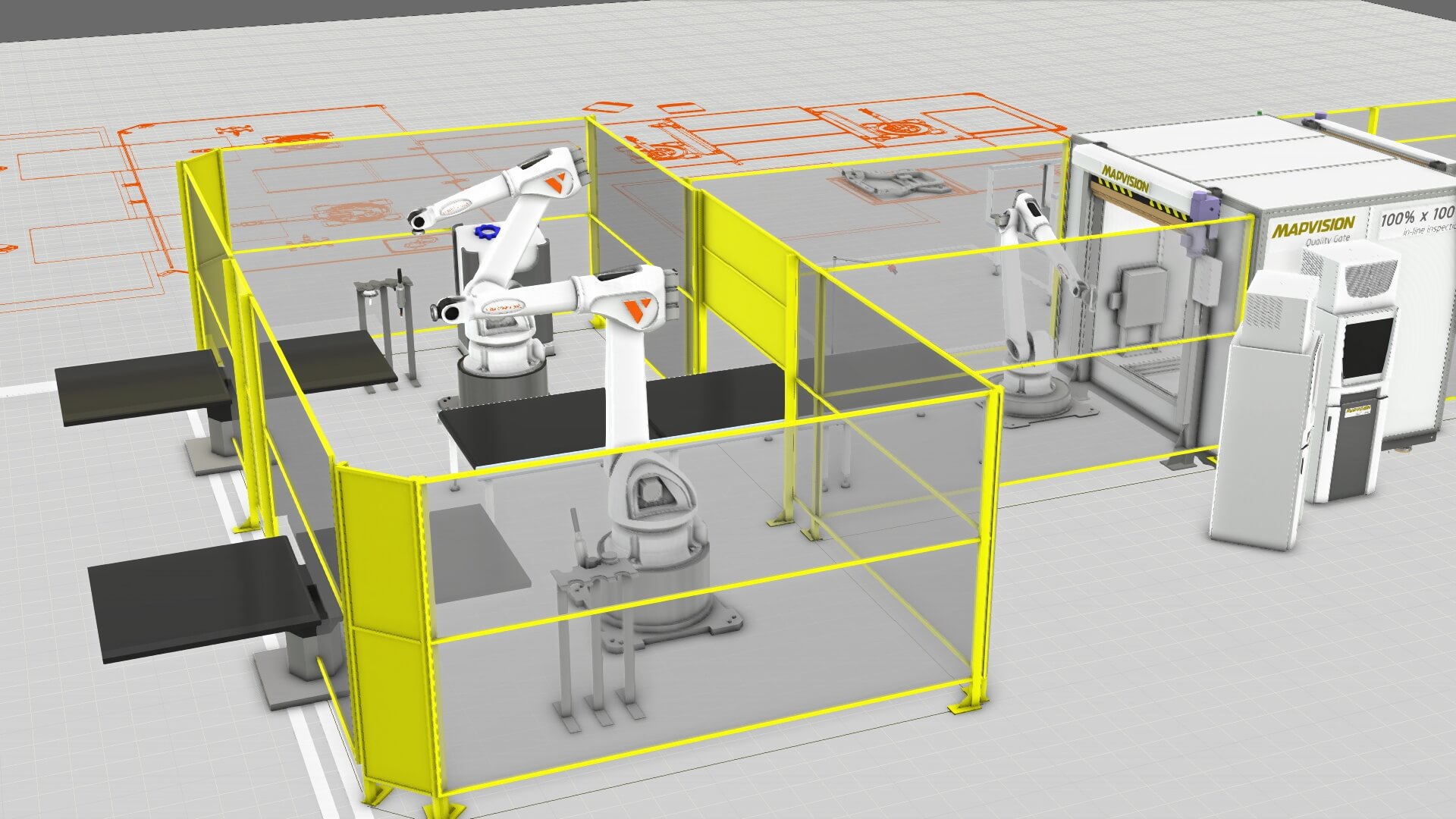
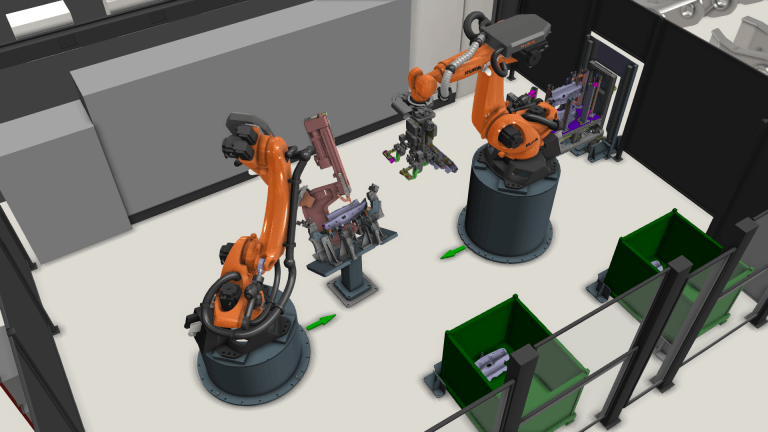
Der erste Schritt bei OLP ist die Erstellung eines virtuellen Models der Arbeitszelle. Dies beinhaltet die Erstellung oder Beschaffung von 3D-CAD-Modellen der Ausrüstung, der Arbeitsstücke, des Gehäuses, der Tools und anderer Ressourcen und Vorrichtungen, die in der Arbeitszelle sein sollen, sowie deren Import in Ihre OLP-Software. Weitere Schritte können notwendig sein, um Ressourcen und Prozesse zu simulieren, je nach verwendeter OLP-Software. Die Genauigkeit der Modelle und der verwendeten prozessbezogenen Informationen ist entscheidend, um eine zuverlässige Simulation des Prozesses und eine fehlerfreie Offline-Programmierung der Roboter zu erstellen.
2. Erstellung von Werkzeugwegen
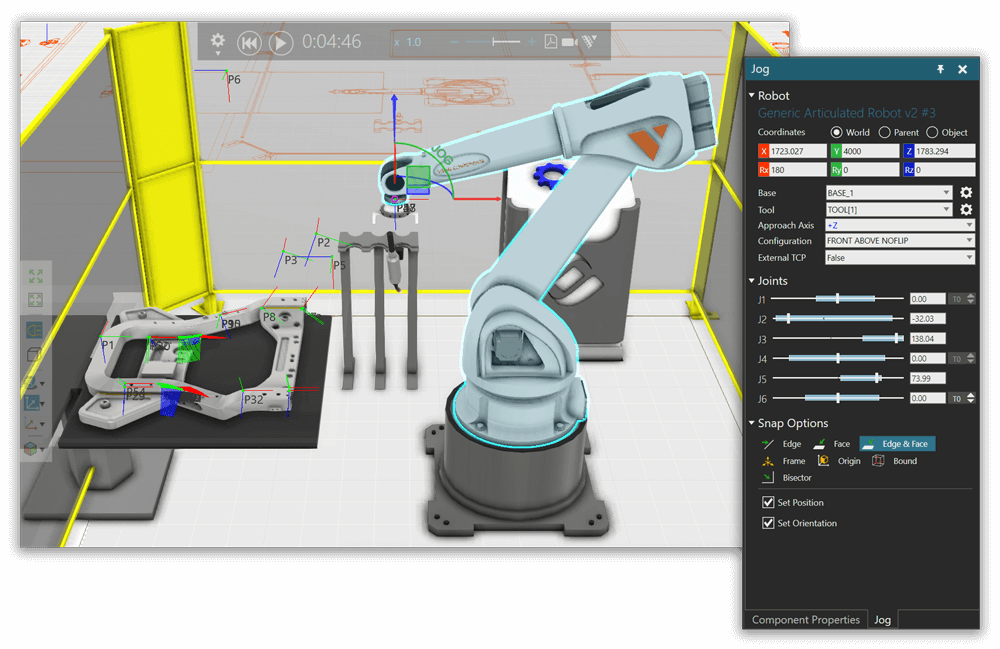
Für die Erstellung von Werkzeugwegen werden Roboterpositionen aus 3D-CAD-Daten mit einem bestimmten Werkzeugmittelpunkt extrahiert – dem Punkt, nach dem alle Roboterpositionen definiert werden. Viele OLP-Software-Pakete können dies automatisch und besitzen eingebaute Funktionen, um Werkzeugwege anhand von Merkmalen des CAD-Modells zu erstellen, wie Ecken, Kanten oder andere geometrische Merkmale.
3. Prozessoptimierung
Die Prozessoptimierung beinhaltet die Planung von Bahnkurven, die Prozessplanung und die Werkzeugentwicklung. Es ist ein iterativer Gestaltungsprozess, in dem viele Faktoren und Kompromisse abgewogen werden, damit die Simulation den Prozess auch wirksam unterstützen kann.
- Im Rahmen der Planung von Bahnkurven muss die beste Strecke eines Roboters von Punkt A nach Punkt B festgelegt werden. Dies hört sich einfach an, ist aber keine leichte Aufgabe und dreht sich nicht immer nur darum, den schnellsten oder kürzesten Weg zu planen. Roboterarbeitszellen sind normalerweise kompakt konfiguriert. Daher müssen Bewegungen und Bahnkurven sorgfältig geplant werden, um unerwünschte Interaktionen zwischen dem Roboter und anderen Objekten in der Zelle zu vermeiden. Verschiedene Faktoren müssen einbezogen werden, wie Bewegungsart, Konfiguration / Geschwindigkeit /Beschleunigung, Erreichbarkeit, Kollisionserkennung und -vermeidung.
- Zur Prozessplanung gehört die Planung des Prozesses und des Arbeitsablaufs in der Arbeitszelle. Die wichtigsten Einschränkungsfaktoren für diesen Schritt sind Budget, Produktivität und Qualität, aber es gibt auch einige Faktoren und Kompromisse, die einbezogen werden müssen. Dieser Schritt beinhaltet die Layoutplanung, die Ressourcenauswahl (einschließlich Robotern und anderer Ausstattung), Wartungsaspekte und die Ablaufoptimierung.
- Zur Werkzeugentwicklung gehört die Auswahl, Modifikation und Platzierung der Werkzeuge. Dies beinhaltet Robotergreifwerkzeuge und andere, die mit dem Arbeitsstück in Berührung kommen, wie Positionier-Aufspannplatten und Klemmen.
4. Nachbearbeitung
Nachdem das Roboterprogramm in der Simulationsumgebung verifiziert wurde, soll es auf dem realen Roboter umgesetzt werden. Zunächst muss das Programm jedoch in die Sprache des Zielroboters übertragen werden. Dieser Schritt wird Nachbearbeitung genannt. Postprozessoren sind die Treiber, die das Roboterprogramm konvertieren und für diese Konvertierung erstellt werden müssen. Postprozessoren sind speziell auf die Robotermarke, die Anwendung und andere kundenspezifische Anforderungen im Hinblick auf Sicherheit, Anwendbarkeit, Performance etc. zugeschnitten. Nur selten werden Postprozessoren von Grund auf neu entwickelt. Dies ist sehr aufwändig und es gibt zahlreiche Anbieter, die sie kommerziell entwickeln & vertreiben. Dennoch müssen sie individuell an die spezifische Anwendung und Installation angepasst werden. Grob geschätzt sind ca. 80 % der Befehle bei jedem Postprozessor identisch. Was sich jedoch verändert, ist die Anpassung vor Ort für jede Anwendung, für kundenspezifische Anforderungen und für spezielle Makrobefehle, die am Anfang oder Ende eines Programms abgerufen werden müssen.
5. Erstkalibrierung
Zur Erstkalibrierung gehört das Herauskalibrieren von Fehlern zwischen der Arbeitszelle und dem virtuellen Modell sowie die Anpassung des virtuellen Modells. Das Ziel ist, sicherzustellen, dass das Offline-Programm zu 100 % läuft, ohne ungeplante Intervention des Benutzers. Die Kalibrierung findet mit einem Werkzeugmittelpunkt an der Produktionsstätte statt. Je nach Anwendung kann auch ohne Verwendung eines Werkzeugmittelpunkts kalibriert werden, da ein Industrieroboter als eigene Koordinatenmessmaschine verwendet werden kann, um die relativen Positionen kritischer Komponenten in der Arbeitszelle zu bestimmen.
Es ist nicht immer nötig, eine Erstkalibrierung offline durchzuführen – sie kann auch in der Produktionsumgebung stattfinden. Beim robotisierten Punktschweißen gibt es normalerweise rund 10 bis 20 Punkte, die im Roboter programmiert werden müssen. Es geht jedoch wesentlich schneller, wenn der Benutzer den Roboter kalibriert, anstatt dies offline durchzuführen. Auch beim Lichtbogenschweißen gibt es viele Unterschiede zwischen den Arbeitsstücken. Roboter nutzen Visionsensoren, um die Fehler der Arbeitsstücke zu korrigieren.
Zusammenfassung
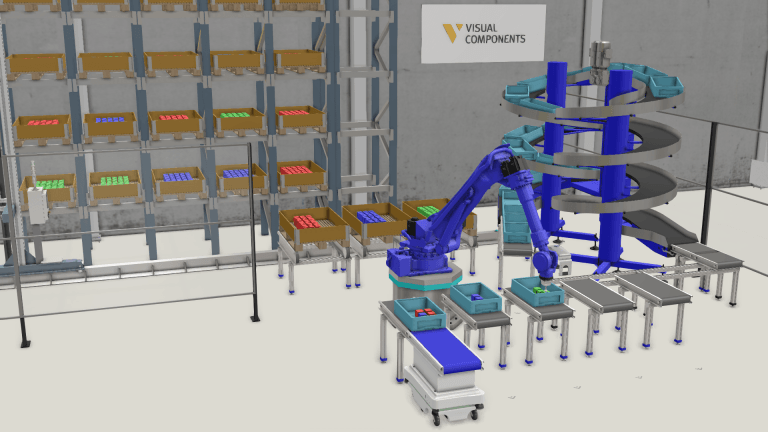
In diesem Artikel haben wir Ihnen einen kurzen und allgemeinen Überblick über die Schritte des OLP-Prozesses gegeben. Wie Sie vielleicht festgestellt haben, geht es bei OLP nicht nur um die Entwicklung eines Roboterprogramms – es ist vielmehr ein Prozess für die Auslegung und Planung einer gesamten Roboterarbeitszelle. OLP-Software unterstützt Hersteller bei der Entwicklung besserer Produktionslösungen, indem sie die zahlreichen Anforderungen, Einschränkungen und Kompromisse im OLP-Prozess visualisieren können.
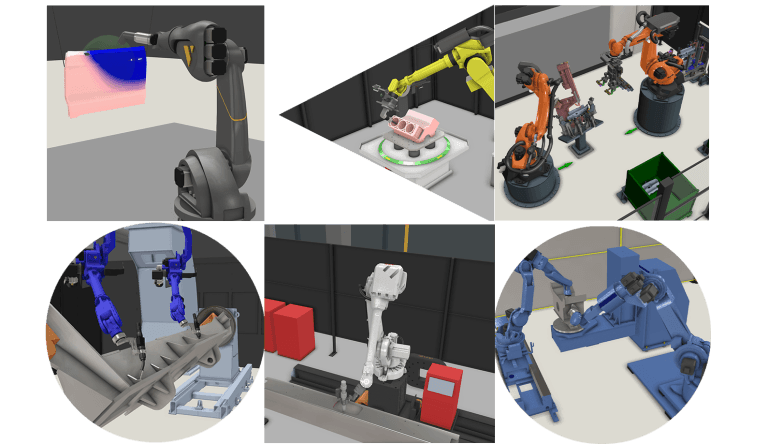
Visual Components Premium enthält erweiterte Features und Anwendungsmöglichkeiten für Hersteller und OLP-Spezialisten, die sich mit der Planung neuer Roboterarbeitszellen befassen. Es wird von zahlreichen führenden Herstellern verwendet, um moderne Roboterarbeitszellen zu entwickeln, in Betrieb zu nehmen und die Zeit bis zur Produktion zu verkürzen. Die Visual Components Plattform wird außerdem genutzt, um kommerzielle OLP-Tools anzutreiben, die weltweit von Hunderten führender Hersteller verwendet werden. Wenn Sie gerne mehr darüber erfahren möchten, wie Visual Components Sie bei der Planung Ihrer nächsten Roboterarbeitszelle unterstützen kann, dann kontaktieren Sie uns gerne!
(1) Pan, Z., Polden, J., Larkin, N., van Duin, S. & Norrish, J. (2012). Recent progress on programming methods for industrial robots. Robotics and Computer Integrated Manufacturing, 28 (2), 87-94
Zum Weiterlesen
Roboterprogrammierung für industrielle Prozesse mit Visual Components OLP Software
Die Offline-Programmierung treibt die Roboterprogrammierung voran, indem sie es Herstellern ermöglicht, Roboteraufgaben virtuell zu optimieren, ohne die Produktion zu unterbrechen. Dadurch werden Ausfallzeiten minimiert, die Genauigkeit verbessert und Prozesse wie...
Wie Roboter-Offline-Programmierung die Effizienz in Produktionslinien mit hoher Variantenvielfalt & niedrigen Stückzahlen steigert
Häufige Produktionsumstellungen und kleine Stückzahlen können die Produktion verlangsamen, aber es muss nicht so sein. Mit der Roboter-Offline-Programmierung (OLP) können Hersteller mit hoher Variantenvielfalt und geringen Stückzahlen (High-Mix, Low-Volume) Roboter...
Produktionslinien auf intelligente Weise mit Simulation optimieren
Hersteller sind ständig auf der Suche nach Verbesserungsmöglichkeiten – sei es durch höheren Durchsatz, weniger Engpässe oder eine effizientere Ressourcennutzung. Ohne die richtigen Werkzeuge kann die Optimierung von Fertigungslinien jedoch...