Roboter-Teach-in mit Visual Components
In diesem Artikel möchten wir Ihnen kurz die Roboterprogrammierung und die Möglichkeiten erläutern, wie Sie Visual Components für die OLP-Vereinfachung…

Offline Programming (OLP)-Software hat sich im Lauf der letzten Jahre extrem weiterentwickelt. Was einst als eine für die meisten Hersteller zu kostspielige und komplexe Technologie galt, ist heute moderner, preiswerter und anwendungsfreundlicher geworden. OLP-Software bietet einen hohen Return on Investment bei vielen Automatisierungsprojekten, indem sie Zeit spart, die Produktivität verbessert und Herstellern hilft, Chancen für Kosteneinsparungen zu erkennen.
In diesem Artikel möchten wir Ihnen kurz die Roboterprogrammierung und die Möglichkeiten erläutern, wie Sie Visual Components für die OLP-Vereinfachung nutzen können. Wir stellen Ihnen einige der wichtigsten Merkmale dafür vor und zeigen Ihnen Beispiele für deren Funktionsweise.
Überblick Roboterprogrammierung
Roboterprogrammierung beschreibt den Prozess der Programmierung eines Roboters, der eine Reihe von Aufgaben ausführen soll. Bei Industrierobotern kann die Programmierung „online“, also in einer Produktionsumgebung, oder „offline, sprich außerhalb der Produktionsumgebung, erfolgen. Die beiden wichtigsten Methoden der Roboterprogrammierung sind Roboter-Teach-in und Offline-Programmierung.
Bei der Teach-in-Methode wird ein Programmierhandgerät verwendet, um einen Roboter-Endeffektor in jeder Phase der Roboteraufgabe manuell in verschiedenen Positionen und Richtungen zu bewegen. Die relevanten Roboterkonfigurationen werden durch die Robotersteuerung aufgezeichnet und es wird ein Programm erstellt, um dem Roboter den Befehl zu erteilen, sich entsprechend der verschiedenen aufgezeichneten Positionen zu bewegen. (1)
Die OLP-Methode nutzt 3D-Daten, um ein virtuelles Model des Roboters und der Arbeitszelle zu erstellen. Durch Simulation kann der Benutzer den Roboter virtuell programmieren. Da OLP eine computerbasierte Methode ist, die digitale Modelle und erweiterte Simulation nutzt, ist sie bei vielen Anwendungen wesentlich schneller und genauer als die Online-Programmierung. Einige Softwareprodukte, die für OLP verwendet werden – wie Visual Components –, verfügen über Funktionen, die auch den OLP-Prozess sehr einfach gestalten.

OLP-Software bietet einen hohen Return on Investment bei vielen Automatisierungsprojekten, indem sie Zeit spart, die Produktivität verbessert und Herstellern hilft, Chancen für Kosteneinsparungen zu erkennen.
Roboter-Teach-in mit Visual Components
Mit Visual Components Premium können Sie Programme erstellen, welche die Aktionen und Arbeitsabläufe definieren, die ein Industrieroboter ausführen soll. Dies kann entweder erfolgen, indem die Roboterpositionen virtuell programmiert werden oder indem das Bahnprogrammierungs-Tool verwendet wird, um Pfade zu generieren. Wahrscheinlich werden Sie eine Kombination dieser Methoden für die Entwicklung Ihres Roboterprogramms nutzen. Ein neues Feature, das in Visual Components 4.0 eingeführt wurde, ist das Bahnprogrammierungs-Tool, welches Roboterbahnprogrammierung extrem vereinfacht. In diesem Kapitel stellen wir Ihnen das Bahnprogrammierungs-Tool und seine Anwendung für die Programmierung von Bewegungsabläufen vor.
Eine Pfadangabe in Visual Components beschreibt eine Folge von Abläufen, die ein Roboter durchlaufen muss, um einen vorgegebenen Weg zu absolvieren. Je nach Anwendung – ob Entgraten, Abdichten oder Lichtbogenschweißen – kann ein Roboterprogramm zehn- oder gar hundertfache Positionen beinhalten, die definiert werden müssen. Die Erstellung eines Roboterprogramms für eine dieser Anwendungen ist daher sehr zeitaufwändig, insbesondere, wenn alle Positionen programmiert werden müssen.
Das Bahnprogrammierungs-Tool vereinfacht dies durch Automatisierung der Roboterpfadprogrammierung. Es analysiert die Objektgeometrie, trifft Vorhersagen zu den Pfaden und liefert Vorschläge. Danach erzeugt es automatisch die Angaben in Ihrem Roboterprogrammierungscode.
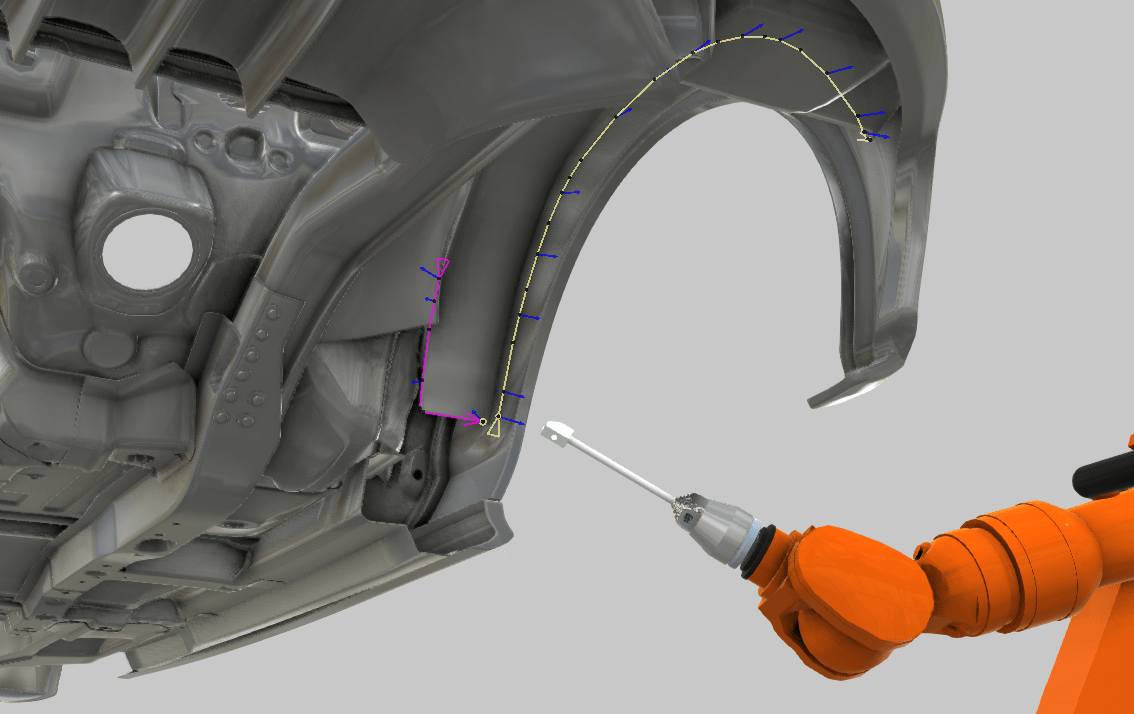
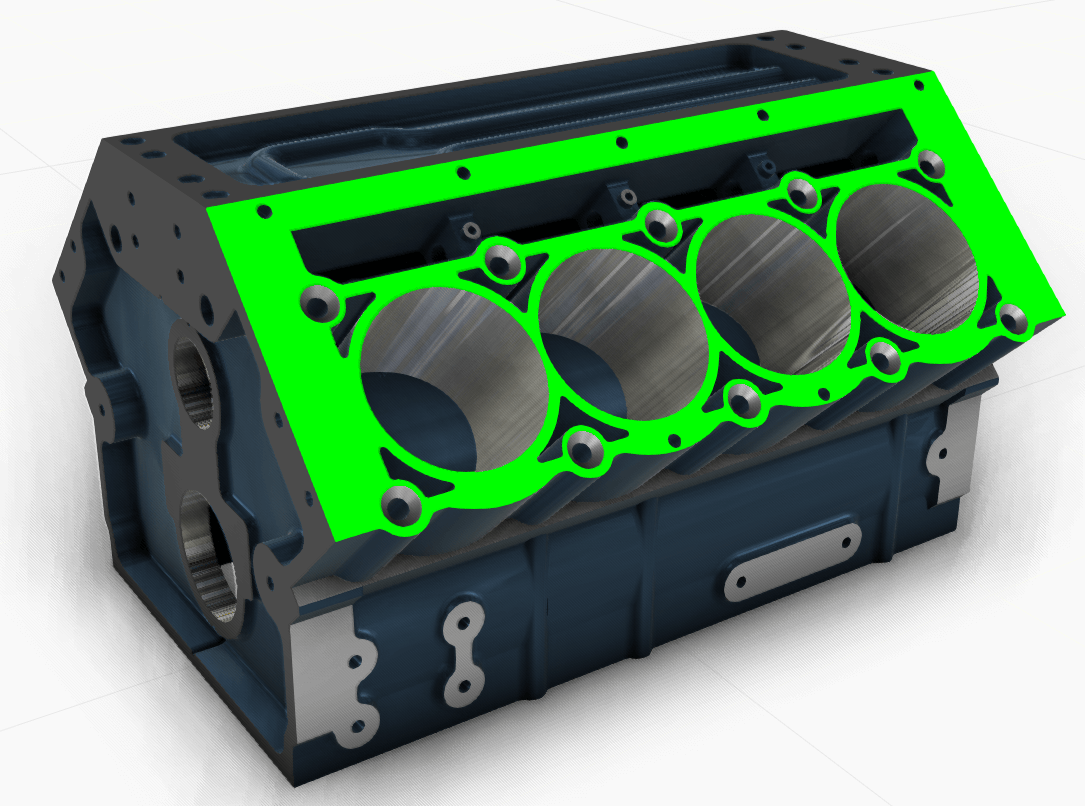
Der Schlüssel hierfür ist die virtuelle Topologie – eine Art Feature-Erkennung in Visual Components 4.0. Wenn ein CAD-Modell in Visual Components importiert wird, analysiert unsere 3D-Geometrie-Engine das Modell und liefert strukturierte Daten von Flächen und offenen und geschlossenen Kurven. Das Bahnprogrammierungs-Tool nutzt diese Daten, um eine Vorhersage zu den Pfaden zu treffen und Roboterpfade vorzuschlagen.
Der Zugriff auf das virtuelle Topologie-Feature ist auch über unsere Topologie-API möglich. Es kann genutzt werden, um maßgeschneiderte Roboterpfade und Programmierungs-Tools zu entwickeln. Dies ist insbesondere für Benutzer geeignet, die ihr eigenes Pfaderzeugungs-Tool für den individuellen Herstellungsprozess Ihres Unternehmens entwickeln möchten.
Zusammenfassung
Visual Components Premium enthält erweiterte Features und Einsatzmöglichkeiten für OLP und ist damit eine schnelle, unkomplizierte und wirtschaftliche Lösung für die Roboterprogrammierung und die Planung neuer Arbeitszellen. Features wie die virtuelle Topologie-API und das Bahnprogrammierungs-Tool unterstützen Sie durch vereinfachte und schnellere Roboterpfadprogrammierung.
Aufgrund der offenen Architektur ist Visual Components 4.0 eine individuell anpassbare und effiziente Plattform zur Entwicklung von OLP-Lösungen. Die Visual Components Plattform wird für den Antrieb von OLP-Tools in vielen Produktionsbereichen genutzt. Beispiele hierfür sind die Produkte, die unsere OLP-Partner Delfoi und Octopuz entwickelt haben.
Wenn Sie herausfinden möchten, wie Sie Visual Components für die Planung und Validierung einer Roboterarbeitszelle verwenden können, kontaktieren Sie uns, um einen Termin für eine persönliche Web-Präsentation zu vereinbaren.
Wenn Sie ein Beispiel für unser Bahnprogrammierungs-Tool in Aktion erleben möchten, dann sehen Sie dieses Video an:.
1) Pan, Z., Polden, J., Larkin, N., van Duin, S. & Norrish, J. (2012). Recent progress on programming methods for industrial robots. Robotics and Computer Integrated Manufacturing, 28 (2), 87-94.
Zum Weiterlesen
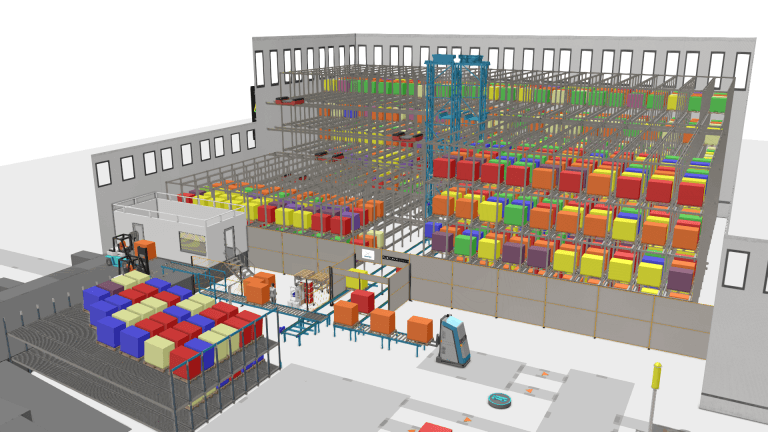
Effiziente Lagerplanung: Wie Simulationen helfen, Lagerprozesse zu optimieren
Wie können Unternehmen Lagerhäuser so gestalten, dass sie vom ersten Tag an effizient arbeiten und gleichzeitig die Arbeitskosten und andere Ausgaben im Zaum halten? Der Schlüssel liegt in einer intelligenten...
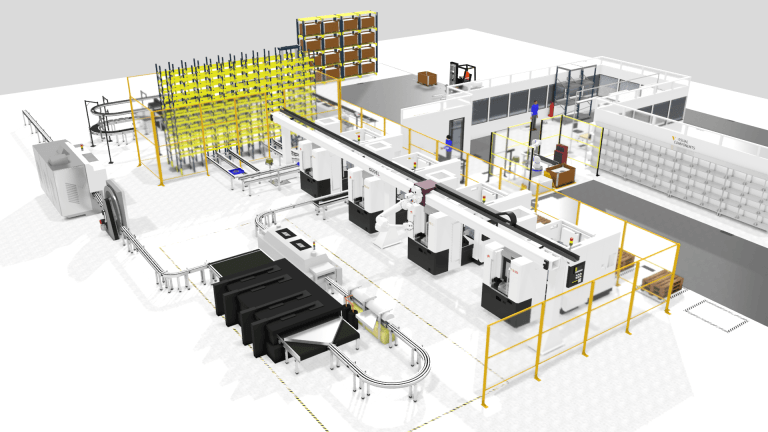
Umfassender Leitfaden zu Eingabedaten für die 3D-Fertigungssimulation
Wenn Sie neu in der 3D-Fertigungssimulation sind, sind Sie hier genau richtig. Dieser umfassende Leitfaden hilft Ihnen, die wesentlichen Eingabedaten zu verstehen, die für die Erstellung effektiver Simulationsmodelle erforderlich sind....
Visual Components 4.9: Gestalten mit Klarheit
Visual Components 4.9 bringt mehr Klarheit in die Produktionsplanung und -optimierung in der Fertigung. Mit mehr Klarheit können unsere Anwender mehr erreichen, einfacher und mit größerem Verständnis, besonders wenn sie...